METERON
The METERON project is a suite of experiments designed to explore new technologies needed to operate robotic assets on the surface of the Moon or Mars from a Lunar/Martian orbital station. In METERON the International Space Station (ISS) is used as an analog of future Lunar/Martian orbital stations. The project is led by Human Robot Interaction Lab at the European Space Agency (ESA) with participation of the German Aerospace Laboratory (DLR), the American National Aeronautics and Space Administration (NASA) and the Russian Space Agency (ROSCOSMOS).
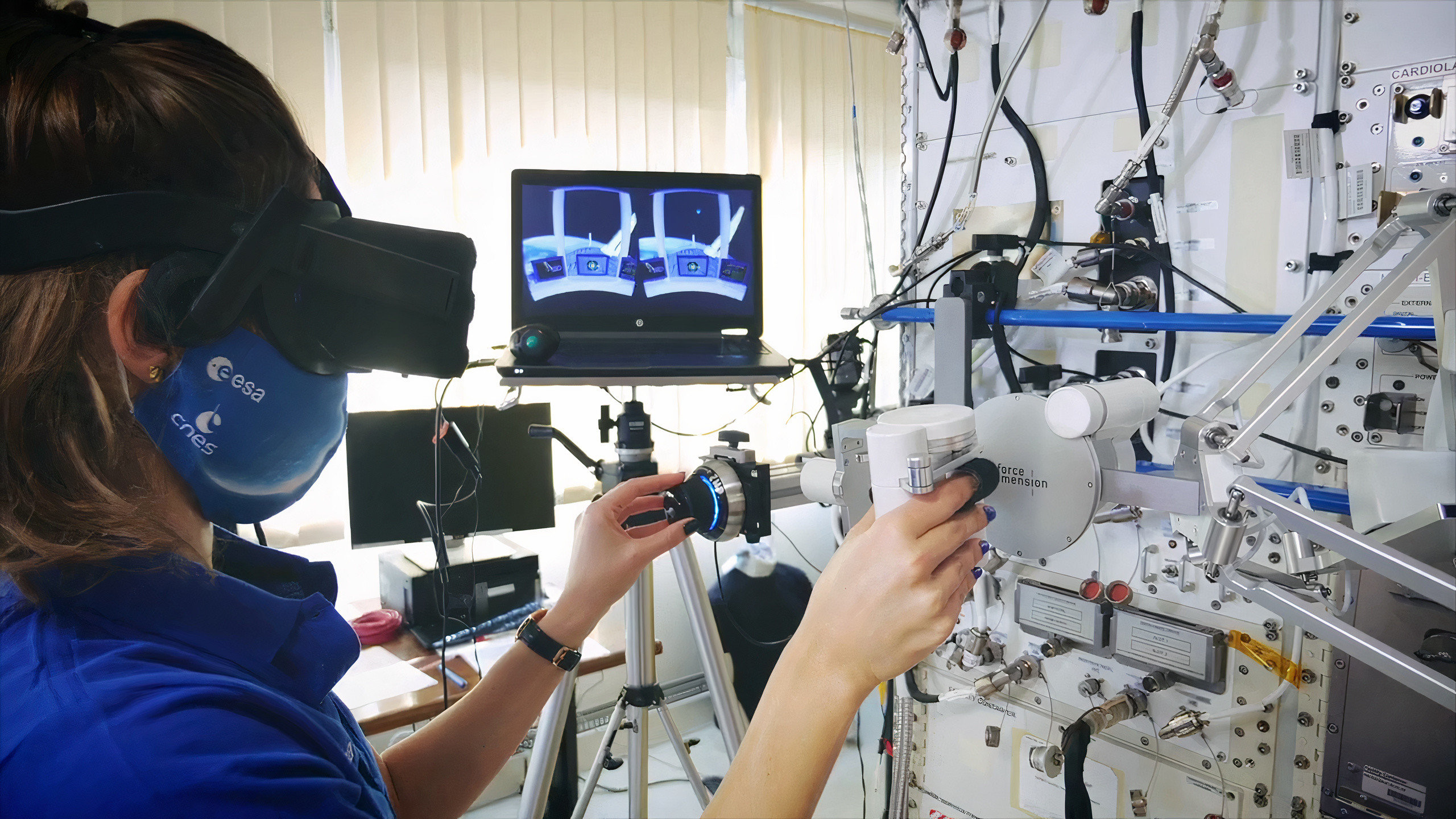
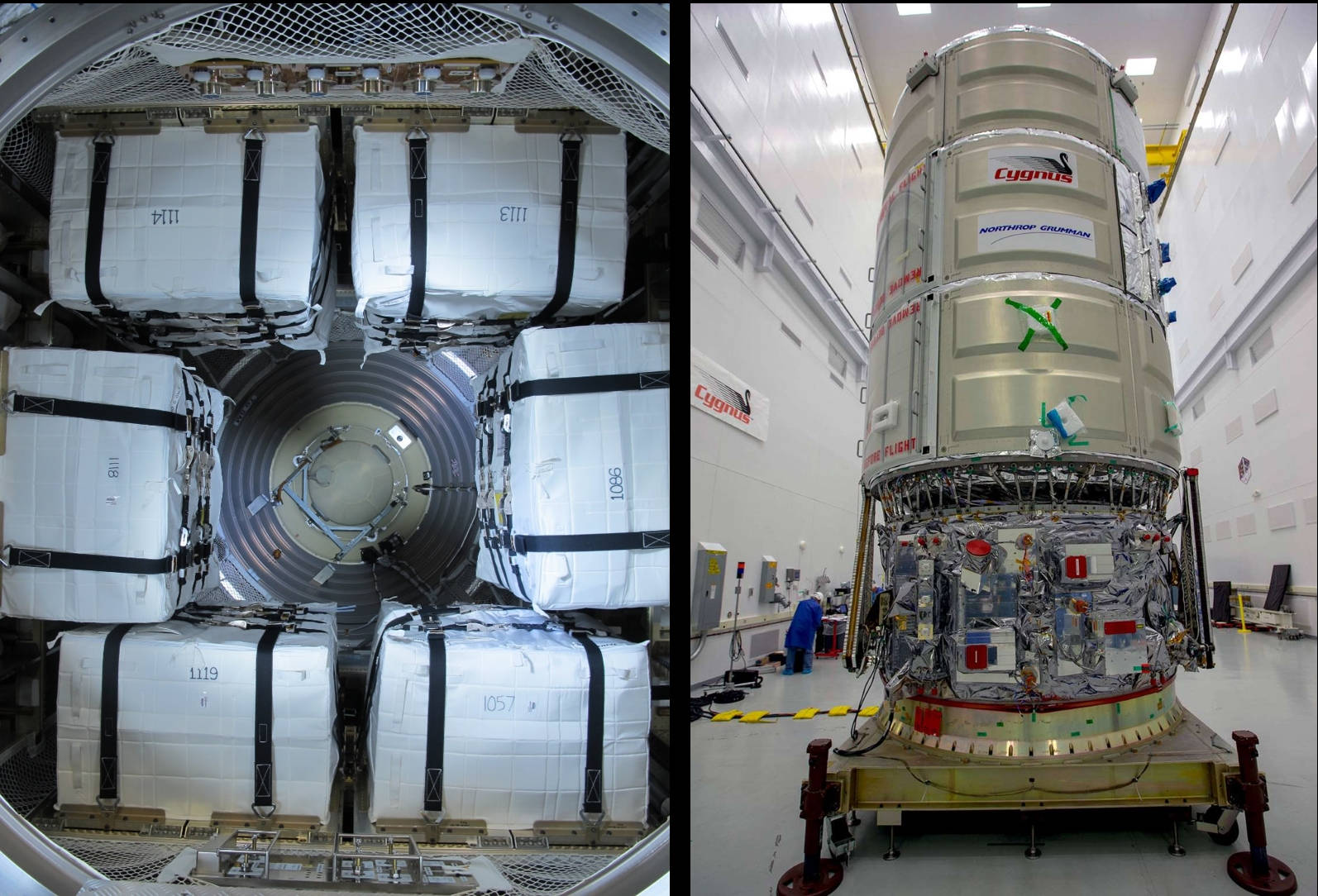
In 2018, ESA submitted a proposal to Force Dimension to design a modified version of its sigma.7 haptic device that could fulfill all technical requirements for usage in space. In Summer 2019 the new sigma.7 received flight certification for both Cygnus (Northrop Grumman) and Dragon (SpaceX) spacecrafts. The haptic device was delivered to ESA and carefully packed before blasting off on November 2nd of the same year aboard a Cygnus cargo resupply mission to the ISS on board an Antares rocket.


ANALOG-1 Flight Experiment
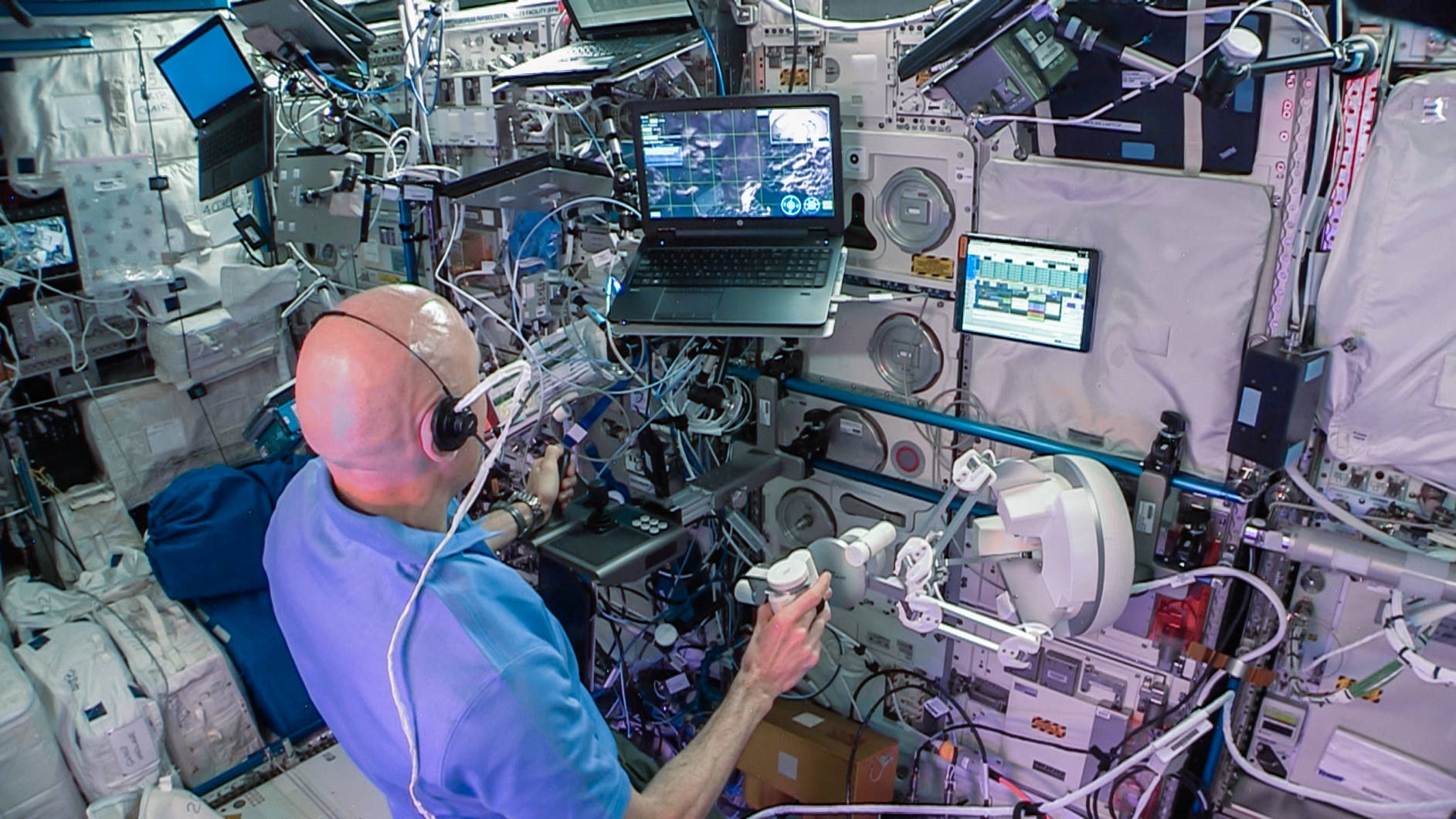
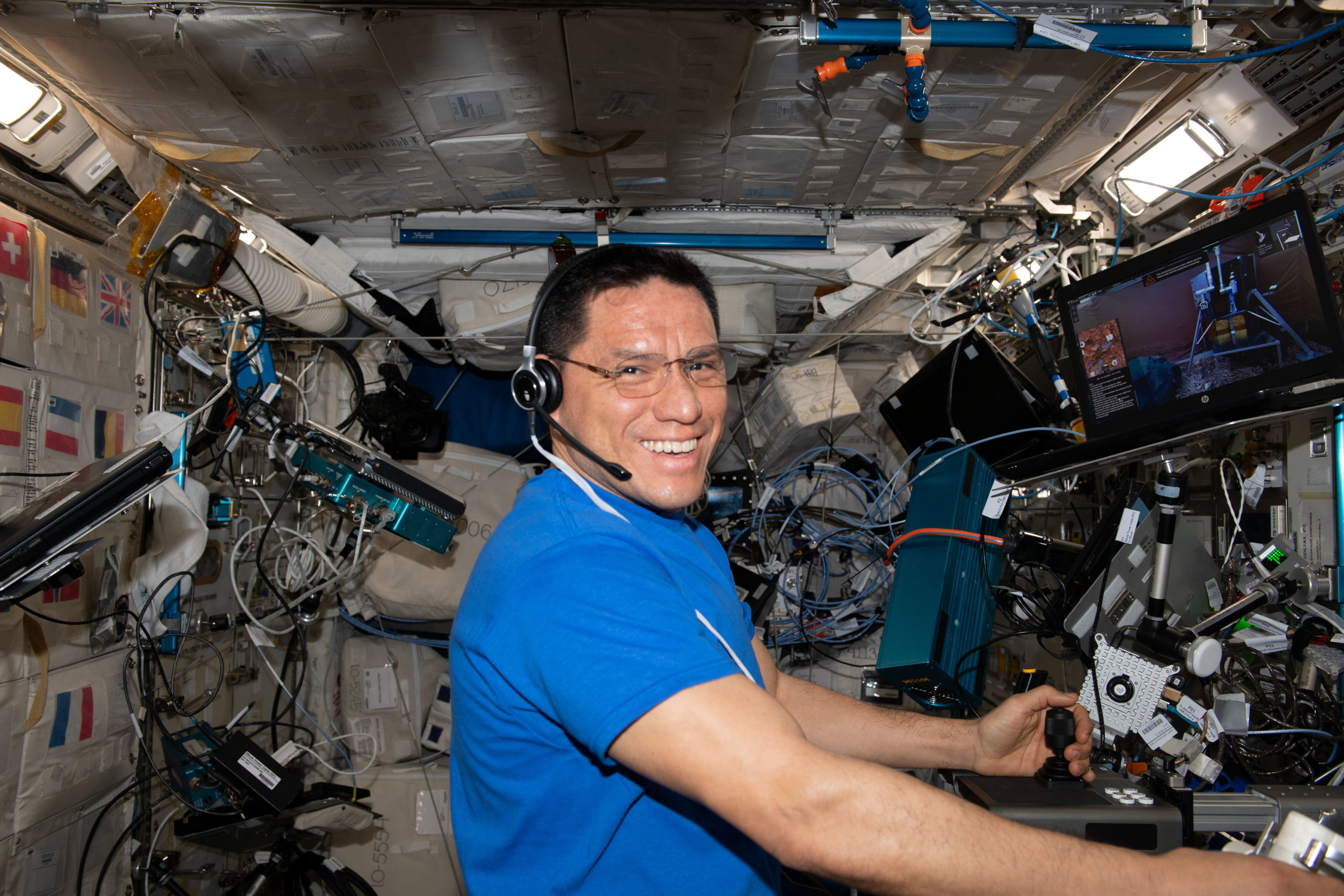
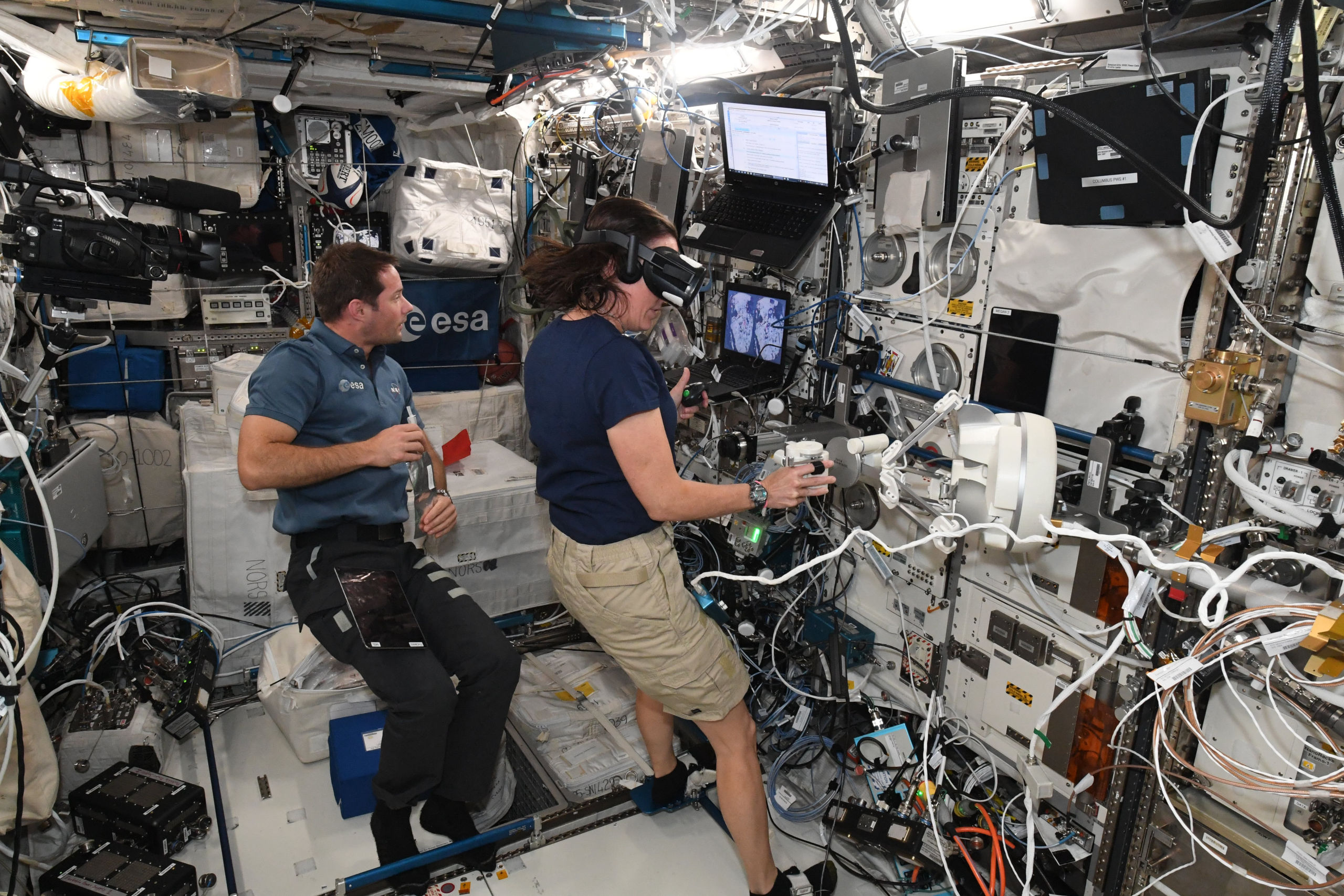
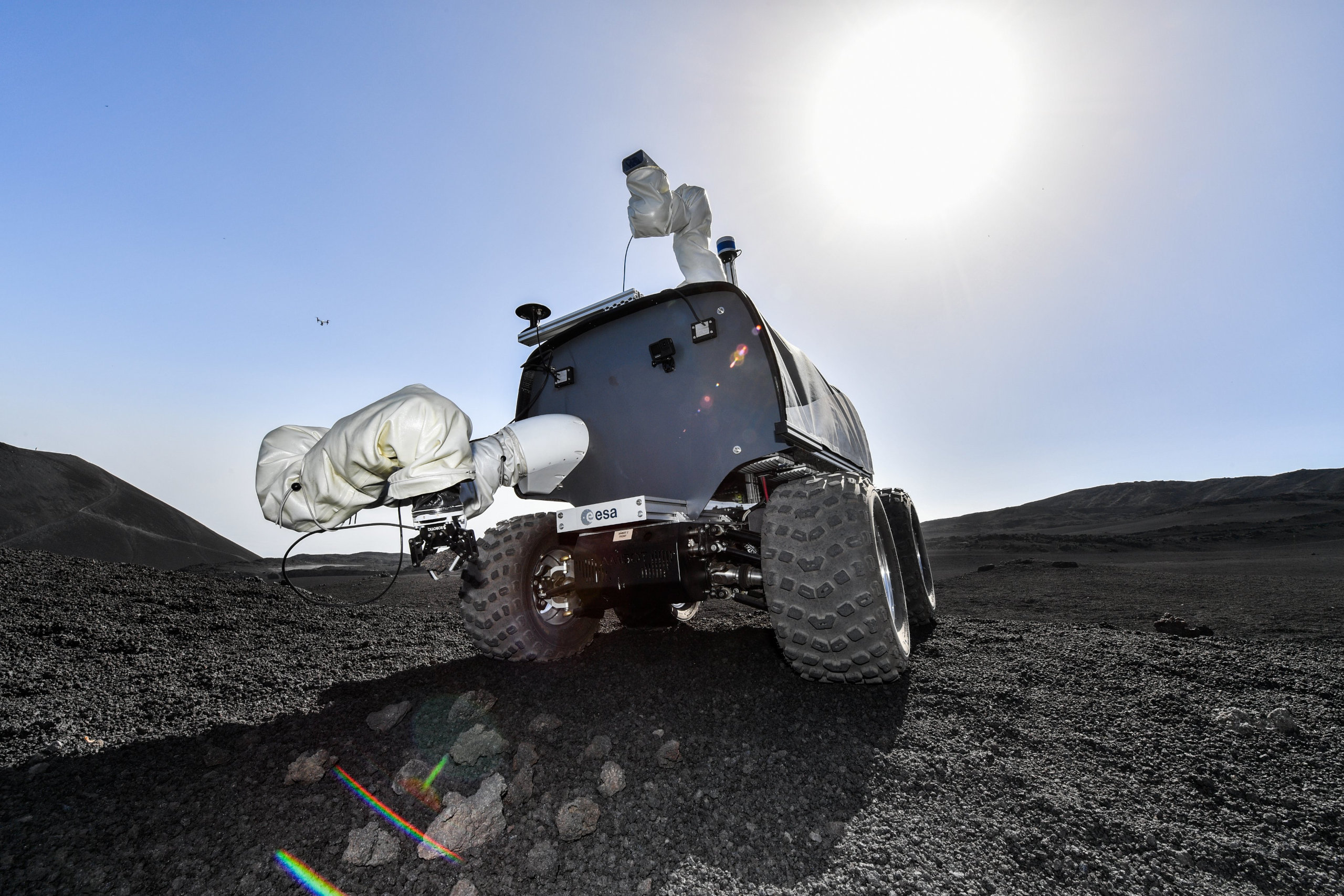
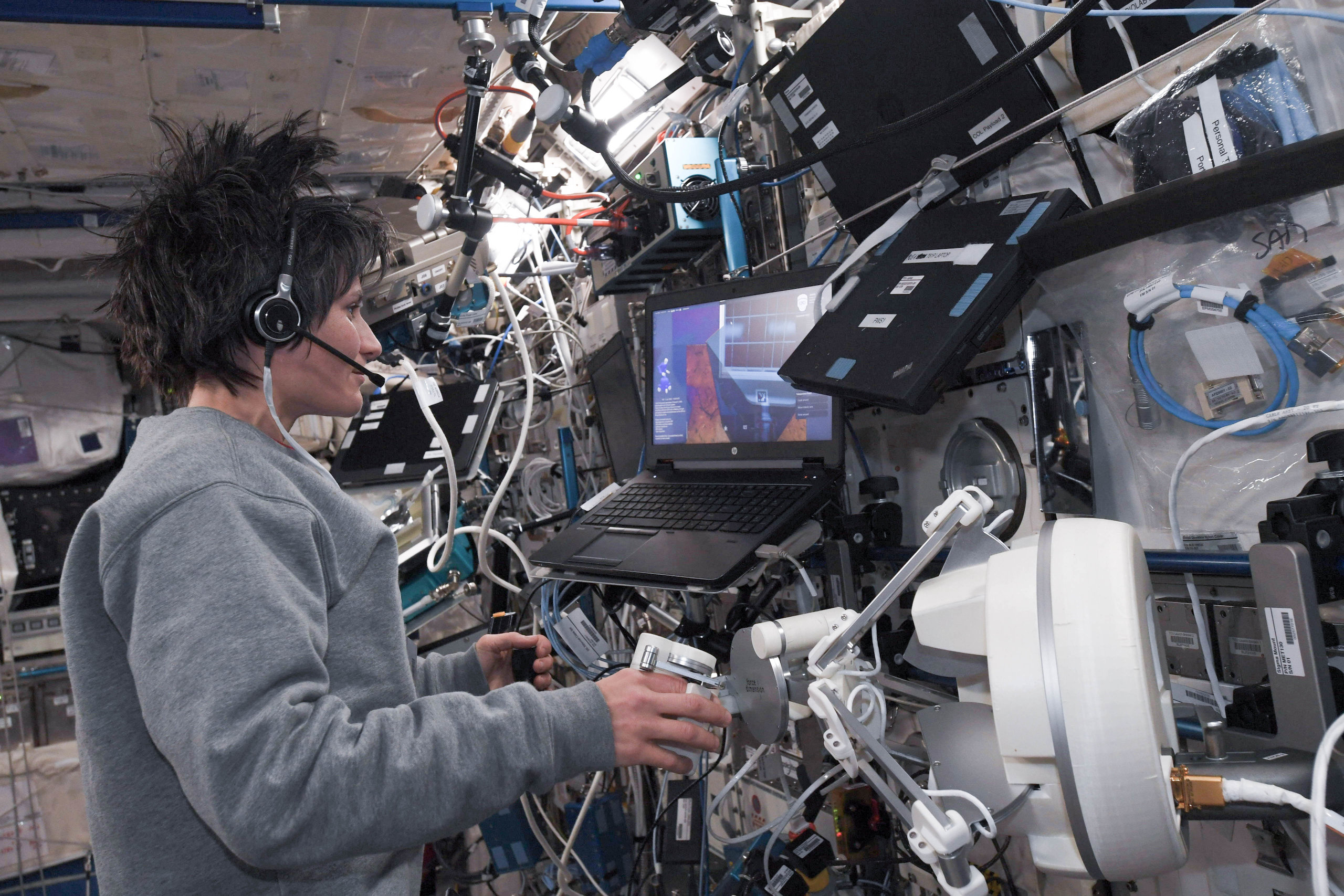
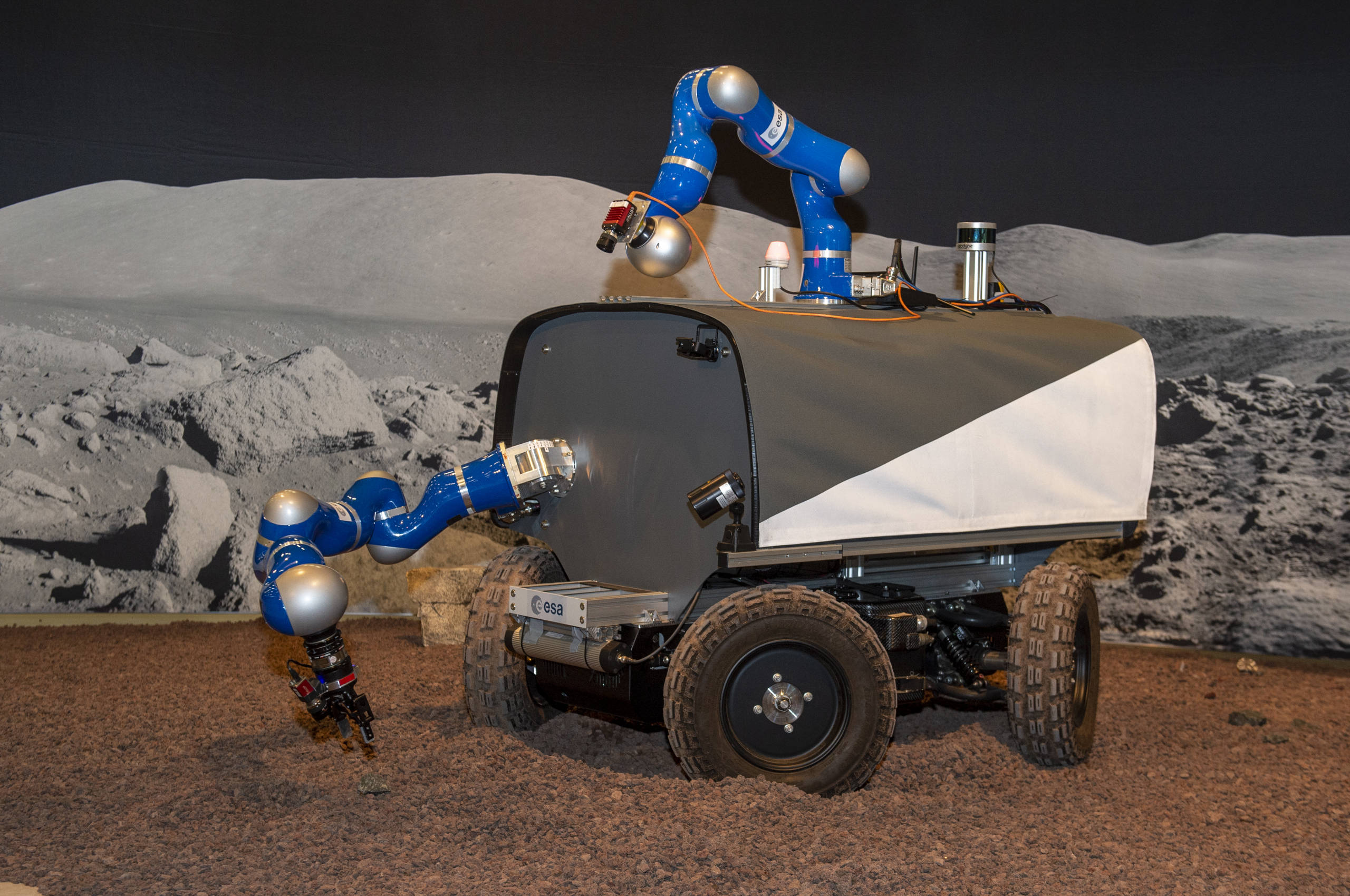
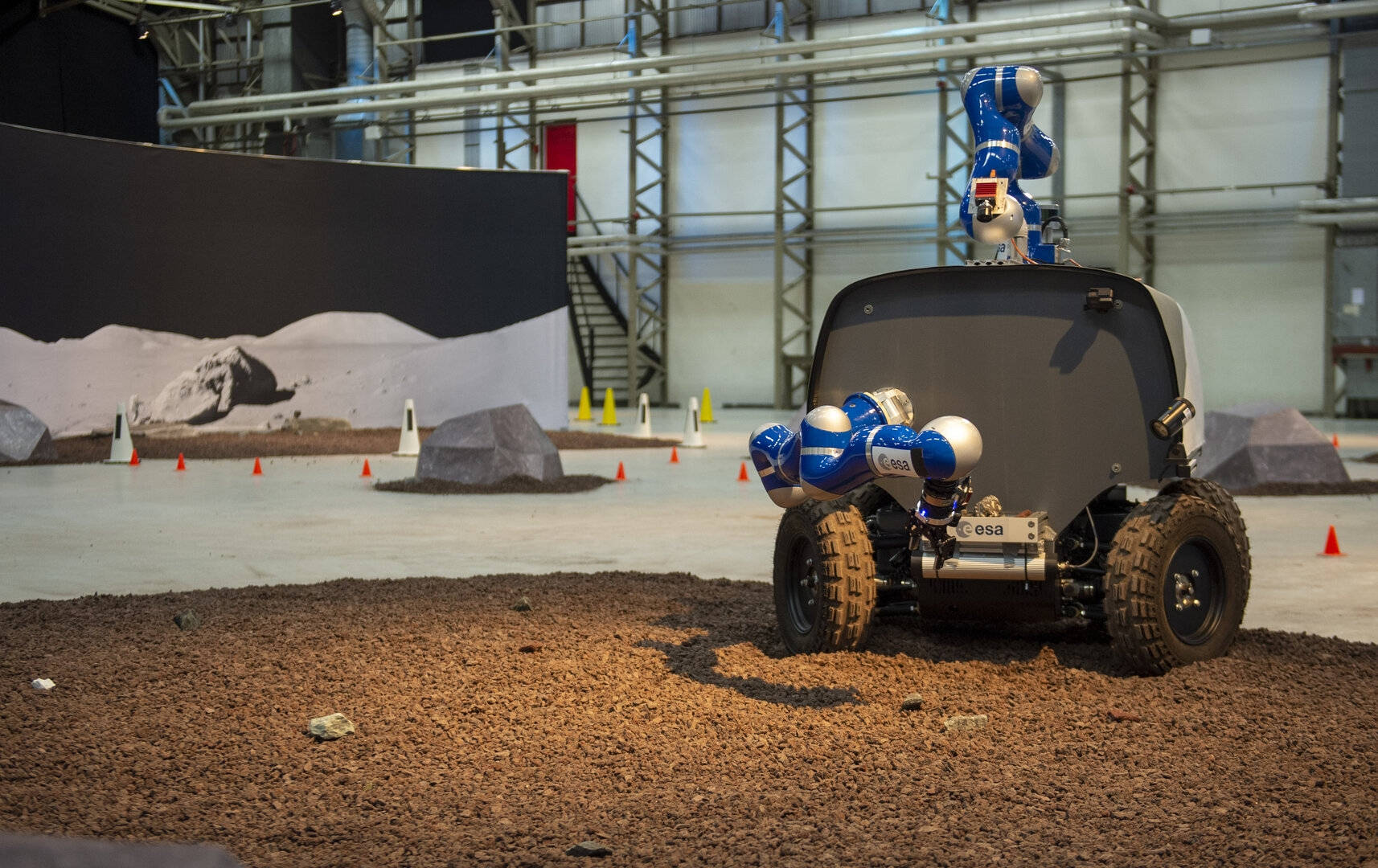
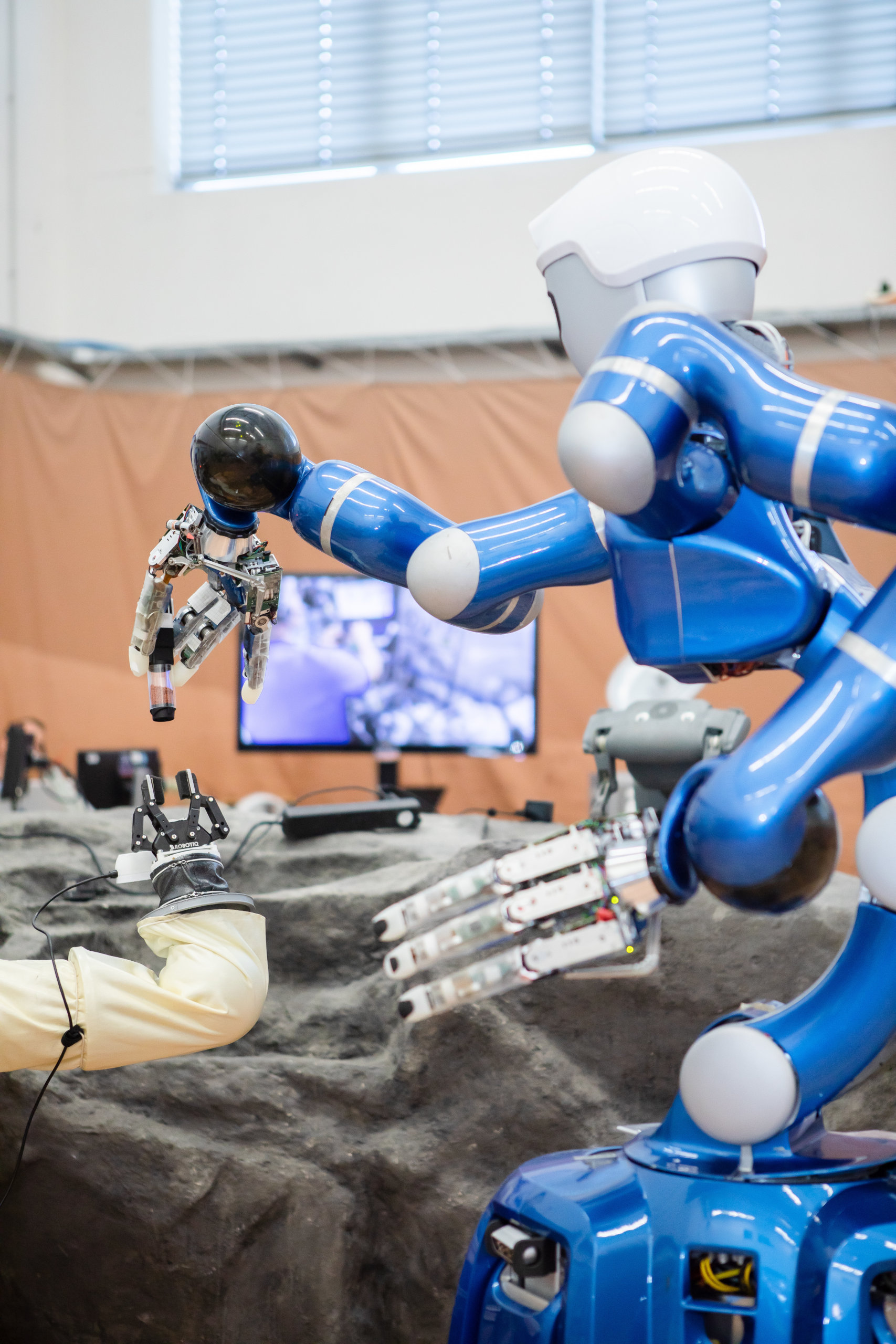
After installing and testing the sigma.7 aboard the Columbus module of the International Space Station (ISS), an internet connection was made between the haptic device and a robotic vehicle located on earth through a geosynchronous satellite constellation. During the experiment, a full robotic vehicle equipped with two lightweight manipulators and a camera system was remotely controlled by ESA Astronaut Luca Parmitano to perform a sub-millimeter precision manipulation task from space.
On November 25th, astronauts were able for the very first time to navigate through a full-on simulated lunar environment, picking up and collecting rock samples while feeling from the space the interaction and contact forces between the rover’s instruments and the geological environment.
This first series of successful tests assessed the ability of a remotely operated rover to conduct geological surveys on alien worlds.
Duration of the sigma.7 aboard the International Space Station (ISS)
Number of completed orbits around the Earth
Distance traveled in Space
Future Missions
As more experiments take place aboard ISS to understand how astronauts perceive tactile cues in zero gravity conditions, new haptic rendering and control algorithms are being developed for the sigma.7 to handle the bilateral control challenges when time delays, in the order of 820 milliseconds, occur due to the more than 92’000 km communication round-trip distance between the haptic device and the rover manipulator located on Earth.
Haptic and control manipulation primitives will be designed so that astronauts can easily and instinctively accomplish tasks that require fine levels of dexterity (e.g. assembly, construction).
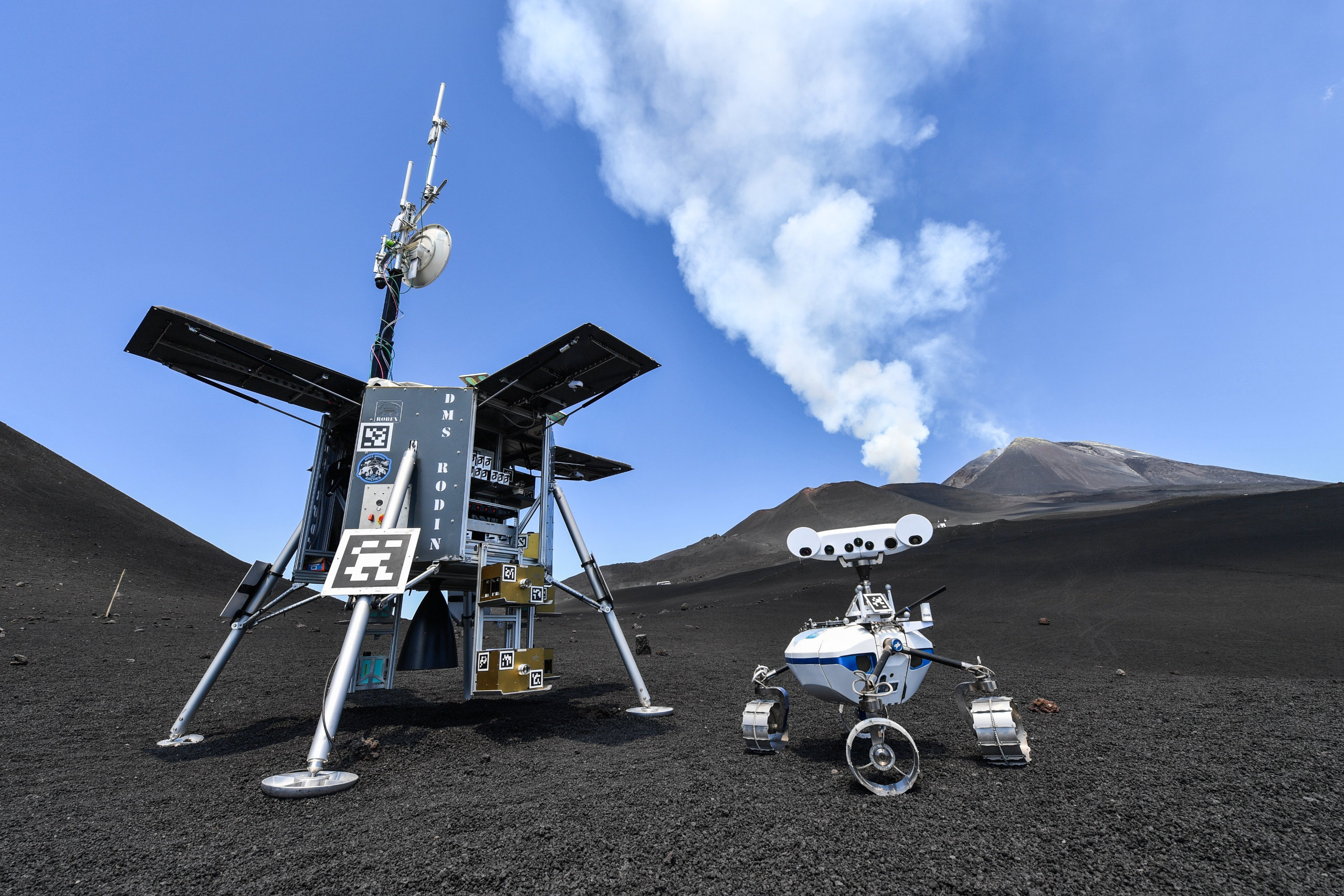
Future experiments will also include operating the rover on Mount Etna in Sicily, Italy. This mission will be placing the rover one step closer to real-world conditions.